Ad hoc Teaming in Multi-robot Systems
We work on algorithms for robots to adapt to new teammates in ad hoc multi-robot teams.
This work was funded in part by ONR N00014-20-1-2249.
Generalized policy improvement for coordination in ad hoc teams
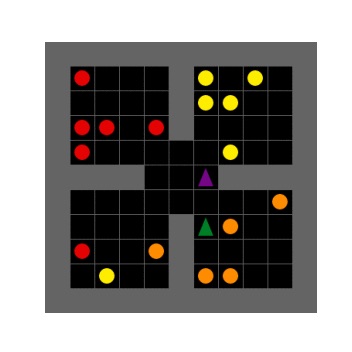
This work proposes a method, generalized policy improvement with successor features for ad hoc teaming (GSAT), for a robot to adapt to new teammates in zero-shot and online adaptation settings. See our IROS 2023 Workshop on Advances in Multi-Agent Learning paper presenting our method for more details.