Robot Navigation and Perception
We work on methods for autonomous robot navigation and perception in unstructured and uncertain environments, like outdoor areas.
This work was funded in part by Army W9132T-19-C-0006, the MITRE Corporation research agreement 126392, and ONR N00014-20-1-2249.


Traversability for robot navigation in the field
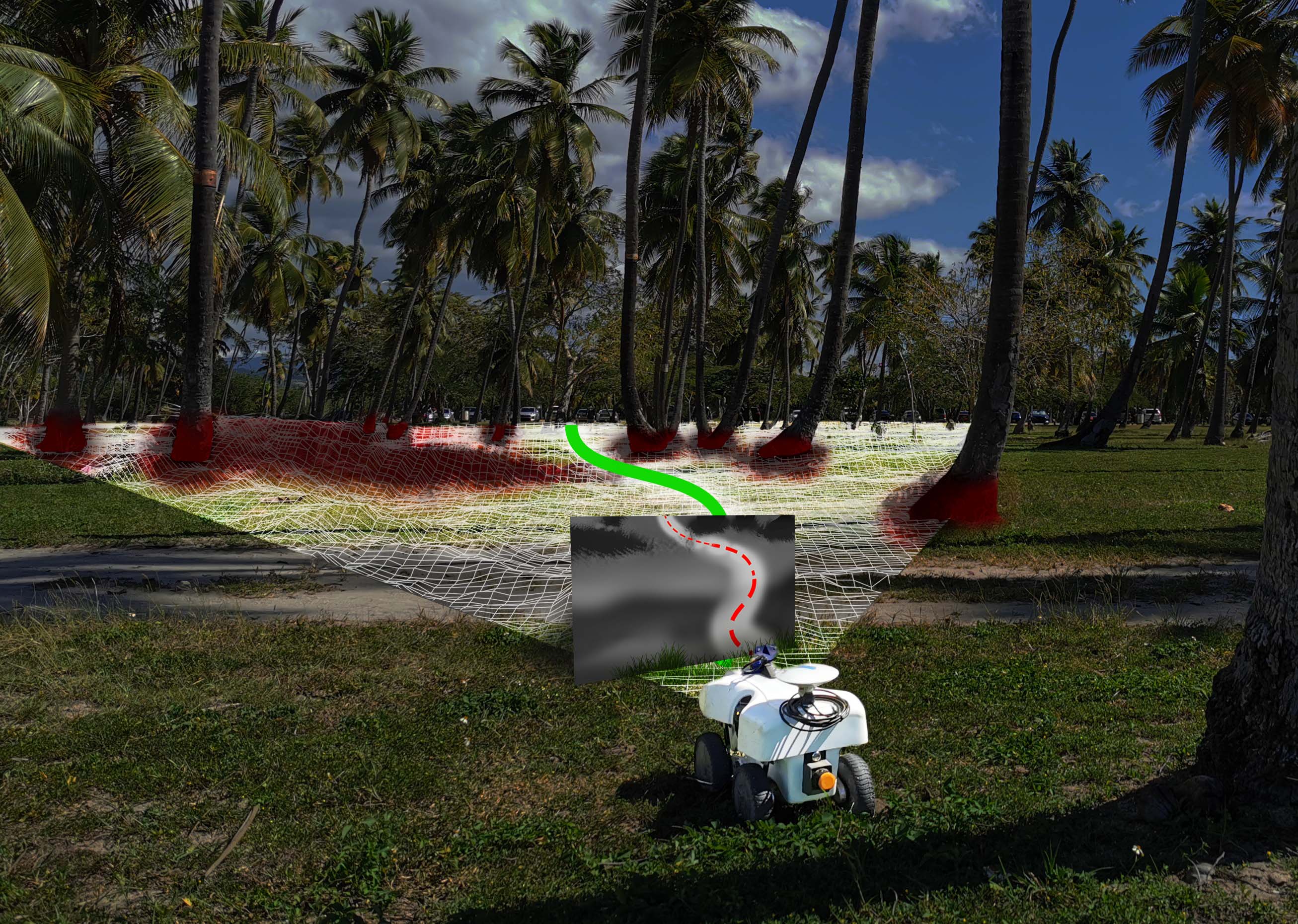
This work presents a new method for robot navigation in unstructured, outdoor environments based on self-supervised traversability estimations. See our RA-L paper presenting our approach, named Waypoint Free Autonomous Systems for Traversability (WayFAST), for more details.
Anomaly detection
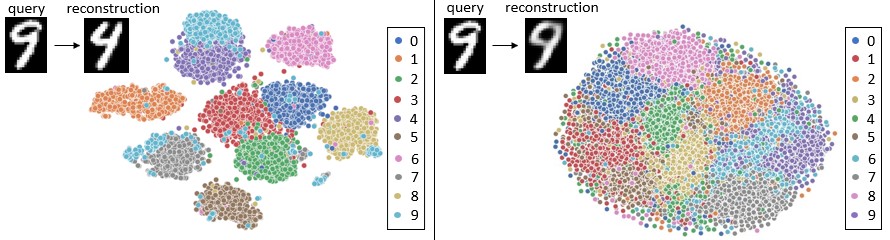
This work explores the problem of anomaly detection in disconnected data manifolds (i.e., multi-class anomaly detection) using a new combination of multi-generator generative adversarial networks (GANs) that leverages a learned bandit for clustering in the latent space. See our IJCNN 2022 paper presenting our approach, named Disconnected Anomaly GAN (D-AnoGAN), for more details.