Robotics and Autonomy
We work on artificial intelligence and controls methods for robots and other autonomous systems (e.g., for space and urban air mobility).
Explaining autonomous agents
This work leverages formal methods to infer human-interpretable explanations of data-driven autonomous agents, such as those trained using deep reinforcement learning.
Traversability for robot navigation in the field
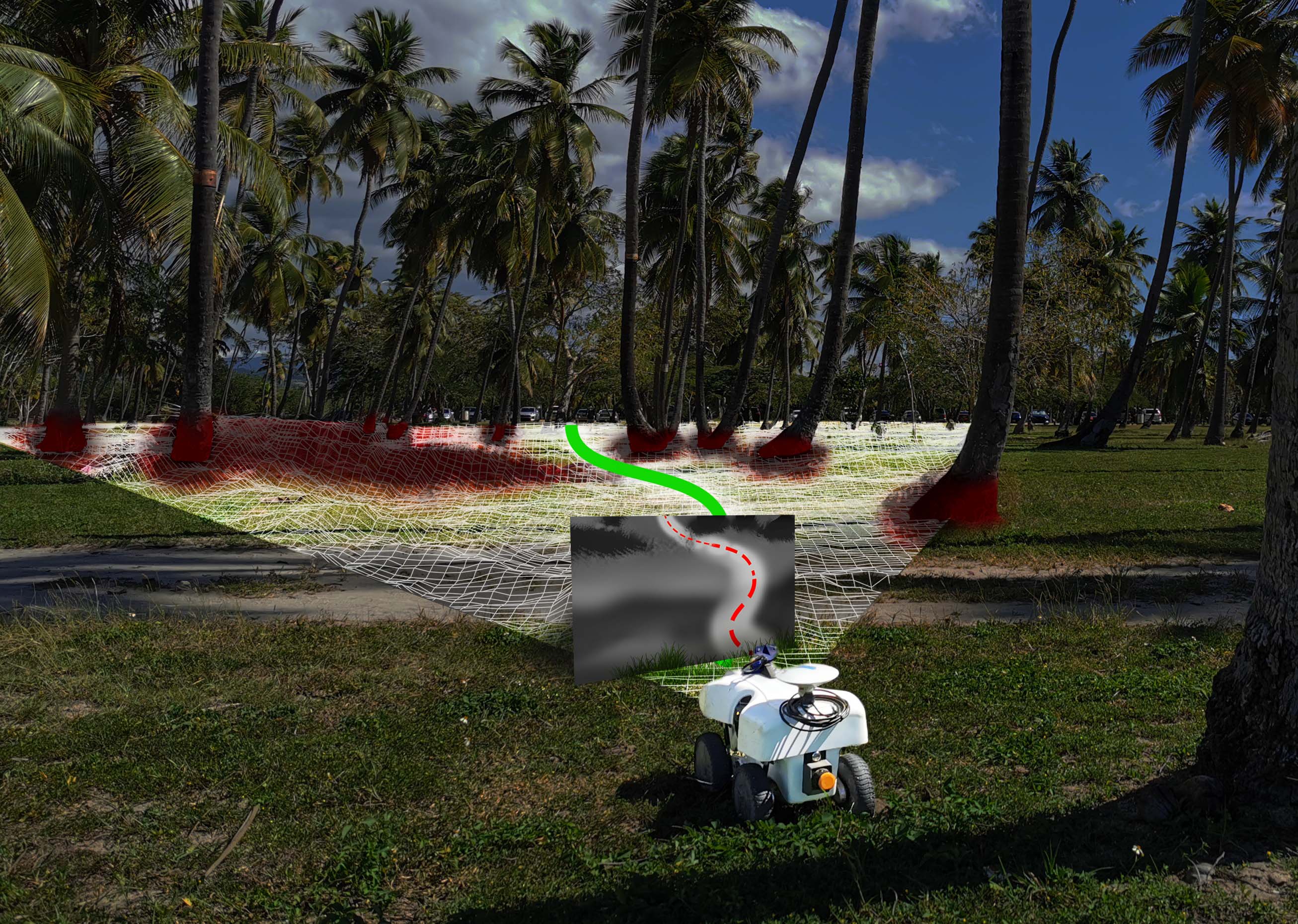
This work presents a new method for robot navigation in unstructured, outdoor environments based on self-supervised traversability estimations. See our RA-L paper presenting our approach, named Waypoint Free Autonomous Systems for Traversability (WayFAST), for more details.
Anomaly detection
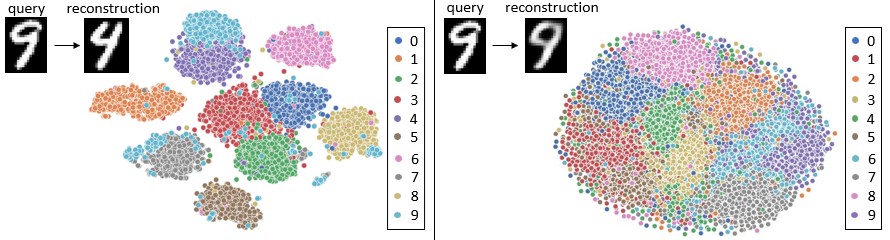
This work explores the problem of anomaly detection in disconnected data manifolds (i.e., multi-class anomaly detection) using a new combination of multi-generator generative adversarial networks (GANs) that leverages a learned bandit for clustering in the latent space. See our IJCNN 2022 paper presenting our approach, named Disconnected Anomaly GAN (D-AnoGAN), for more details.