Robot Navigation and Perception
Learning for autonomous robot navigation and perception in the field
Last updated: February 24, 2026
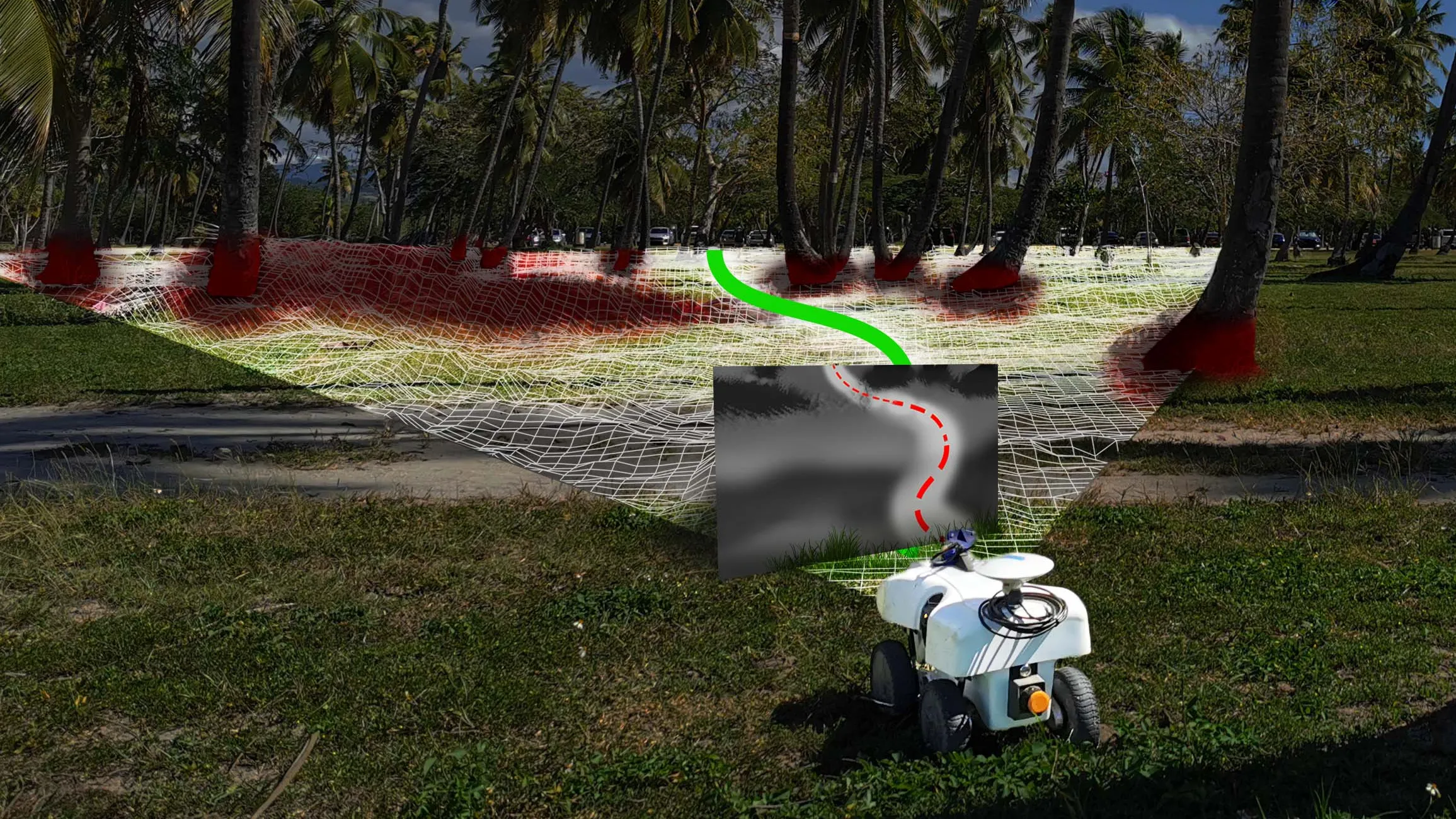
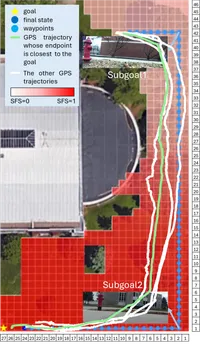
We work on methods for autonomous robot navigation and perception in unstructured and uncertain environments, like outdoor areas. We also work on image-based anomaly detection for complex, multi-modal datasets.
Relevant publications

This work was funded in part by ARL W911NF2020184, Army W9132T-19-C-0006, the MITRE Corporation research agreement 126392, and ONR N00014-20-1-2249.



