Current Projects





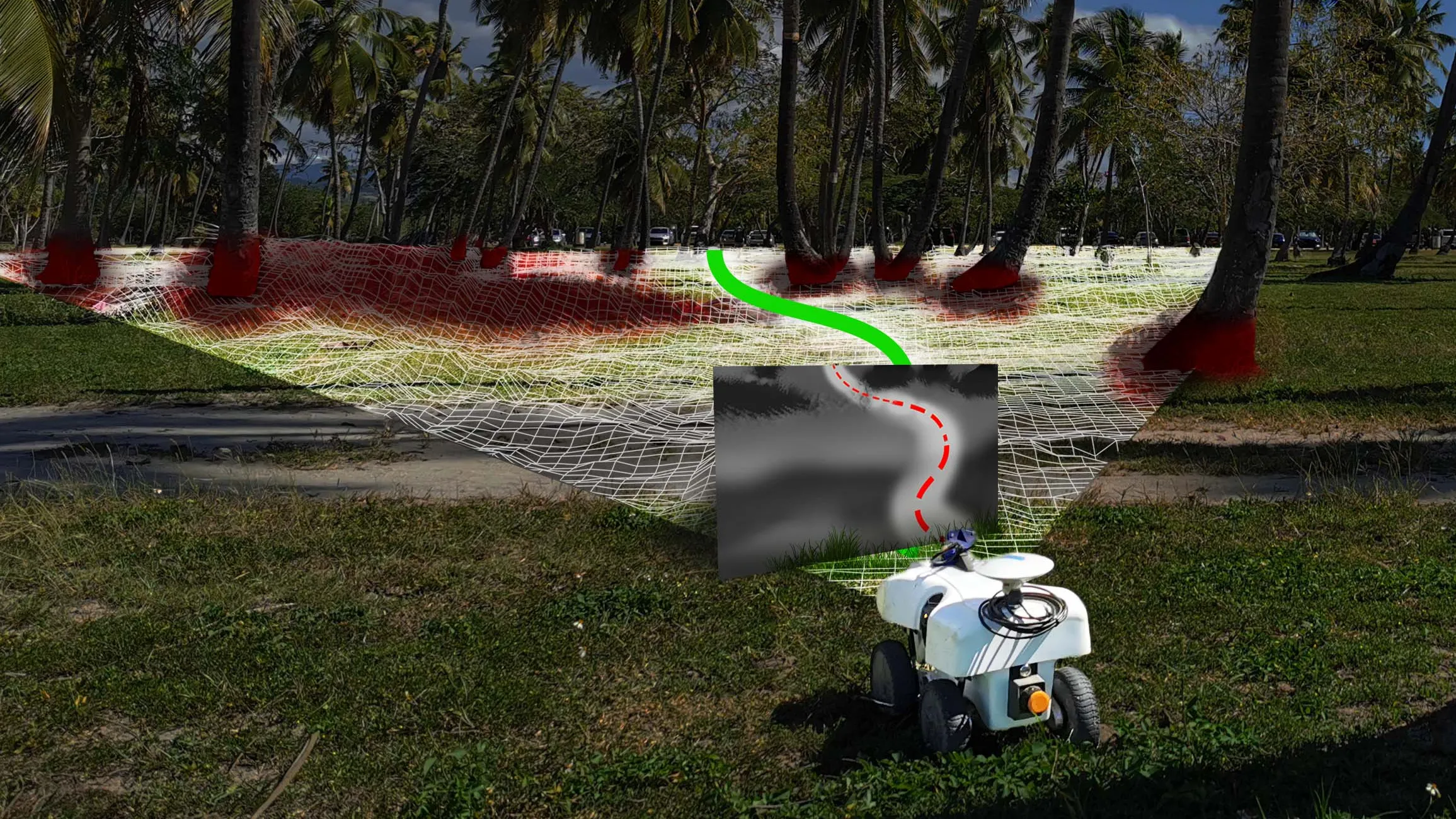
Robot Navigation and Perception
Learning for autonomous robot navigation and perception in the field
We gratefully acknowledge our current and past funding sources.






Learning for autonomous robot navigation and perception in the field
We gratefully acknowledge our current and past funding sources.