
CAAMS
Encouraging emergent coordination in collective autonomous air mobility systems (CAAMS)
Last updated: February 24, 2026
We work on methods for coordinating many agents in collective autonomous air mobility systems (CAAMS), like drone firefighting and urban air mobility. We specifically aim to encourage emergent cooperation in CAAMS, with consideration of heterogeneity (e.g., individual objectives, capabilities) and the overall integrated system (e.g., vehicles and their interactions with operators and services).
One approach we are exploring is to learn how existing collective systems achieve emergent cooperation, particularly those without explicit mechanisms for cooperation. For example, we are exploring the application of inverse reinforcement learning (IRL) to real-world visual flight rules (VFR) data, in an effort to understand how flights coordinate their movements in VFR conditions.
We are also creating metrics to quantify the impact of agents in CAAMS having their own individual objectives, building from existing work in game theory. We focus on a drone firefighting application in this part of the project.
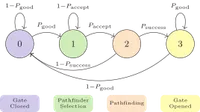
Finally, we are creating models of decision-making for collaborative air traffic control in convective weather—i.e., pathfinder operations.
Relevant publications

This work was funded in part by NASA 80NSSC23M0221 and ONR N00014-20-1-2249.

